Механический входной привод
Механический входной привод Parker – это компонент, используемый в системах автоматизации и привода для передачи механической энергии от двигателя к исполнительному механизму. Продукция компании Parker Hannifin отличается высокой надежностью и точностью, что делает такие приводы востребованными в различных отраслях промышленности. читать подробнее о Механический входной привод
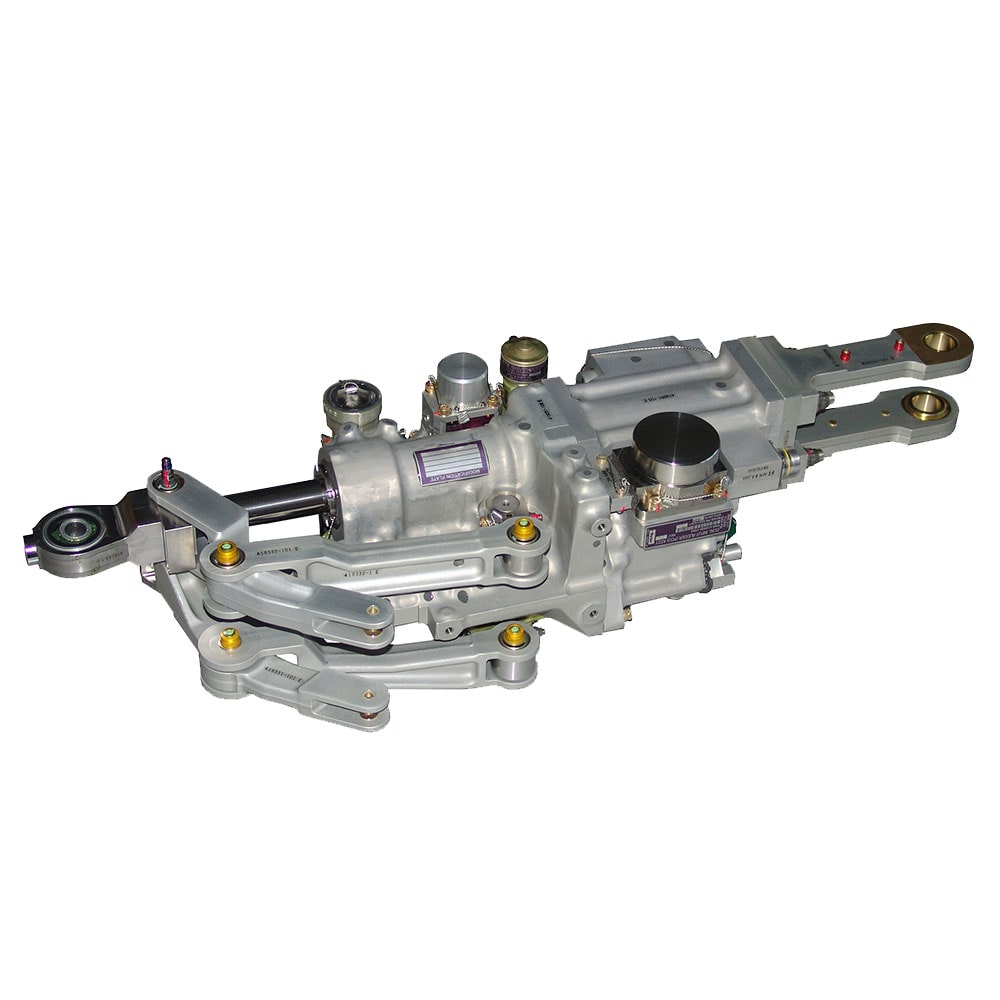
Механический входной привод
Для чего используется механический входной привод Parker:
- Для передачи вращательного момента от двигателя к редуктору или механизму.
- Для обеспечения согласования характеристик привода и нагрузки.
- Для увеличения срока службы оборудования за счёт точной настройки параметров передачи.
- Для обеспечения устойчивой и предсказуемой работы механических систем.
Где применяется:
- В станках с числовым программным управлением (ЧПУ).
- В упаковочных машинах.
- В сборочных роботизированных линиях.
- В автоматизированных конвейерах.
- В оборудовании для обработки материалов (лазерная, плазменная резка и др.).
- В машиностроении и металлургии.
Как применяется:
- Привод монтируется между двигателем и редуктором или рабочим узлом.
- Часто используется вместе с прецизионными сервомоторами.
- Подбирается в зависимости от требуемого крутящего момента, скорости и конфигурации установки.
- Может использоваться в вертикальных и горизонтальных установках, в том числе в условиях ограниченного пространства.
Преимущества:
- Высокая точность передачи движения.
- Компактные габариты и удобство интеграции в системы.
- Долговечность и устойчивость к износу.
- Универсальность применения в различных типах механизмов.
- Надежность даже при высоких нагрузках и в непрерывной эксплуатации.
- Широкий выбор конфигураций и размеров.
Недостатки:
- Более высокая стоимость по сравнению с аналогами от менее известных производителей.
- Требует точного подбора и установки для достижения максимальной эффективности.
- В случае поломки может потребоваться обращение к официальному поставщику для ремонта или замены.
Вывод:
Механический входной привод Parker — это надежное решение для промышленных систем, где важна точность, устойчивость к нагрузкам и долгий срок службы. Несмотря на более высокую цену, инвестиции оправдываются высокой эффективностью и стабильностью работы оборудования.
Механические входные приводы Parker представляют собой безопасное и надежное средство преобразования механических входных сигналов от пилота в гидравлическое выходное движение для позиционирования и управления первичными и вторичными поверхностями управления полетом.